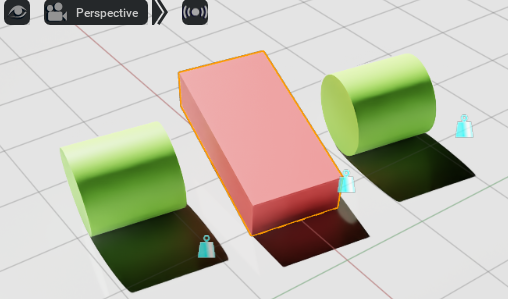
ここまでで作ったCubeとCylinderを車輪ロボットとして、走行させてみます。
Omniverseベースですから、オブジェクトはMayaなどDCCツールやCADで作ったものを使うこともできます。
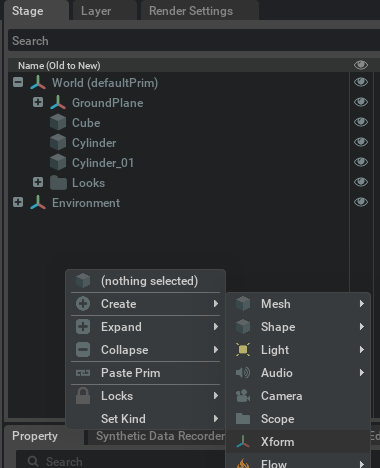
Stageで右クリックから「Xform」を選択します。
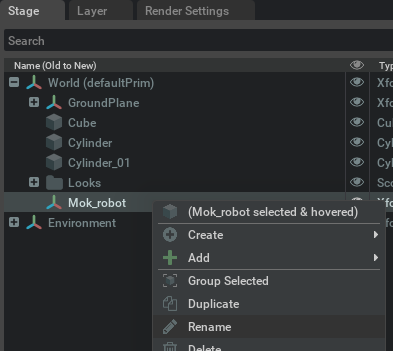
できたXformを右クリックからRenameで「Mok_robot」へ変更します。
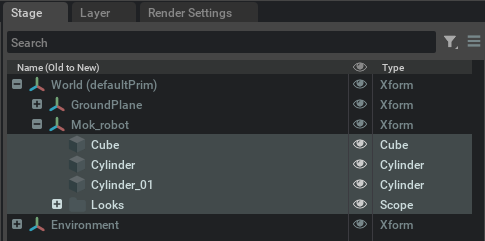
Cube、Cylinder、Cylinder01、LookをShiftキーで4つ選んで、Xformへドラッグ&ドロップします。すると上の図の様に階層化されます。
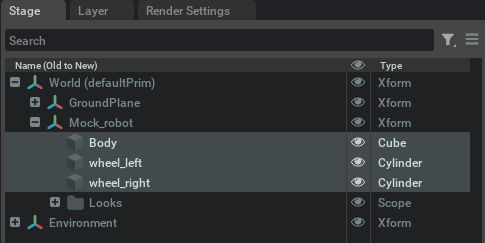
キューブと円柱を図の様に名前を変更します。
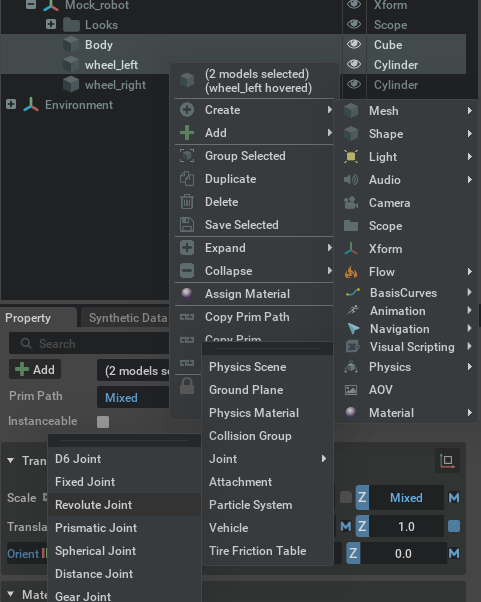
Body→Wheel_Leftの順に選択して、Stageで右クリックして、「Create」→physics→Joint→RevoluteJointを実行します。
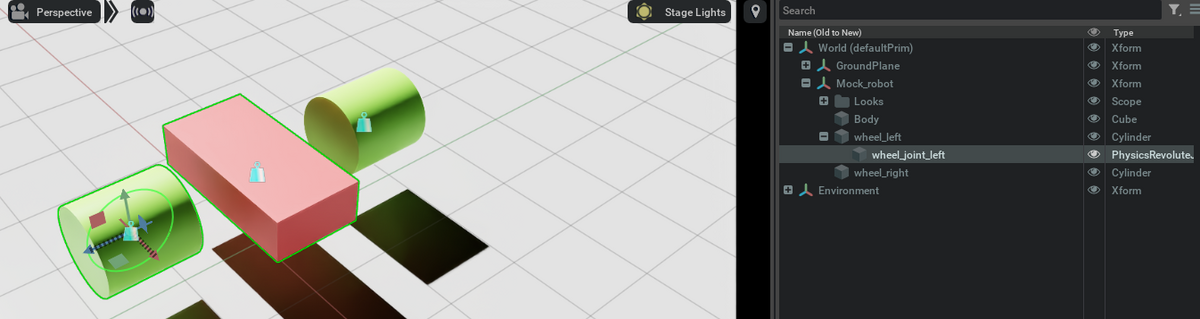
Wheel_Leftの下に階層ができるので「Wheel_Joint_Left」へ名前を変更します。
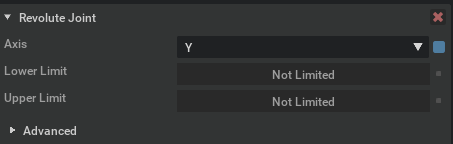
選択したまま、AxisをYに変更
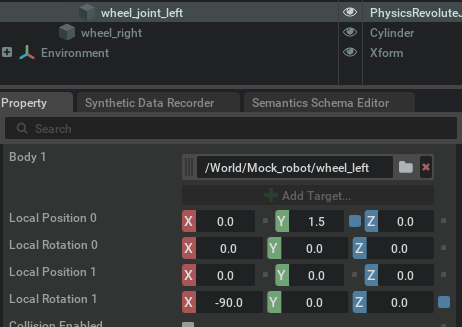
LocalRotation0を0、LocalRotation1を-90に変更します。
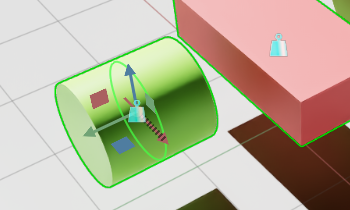
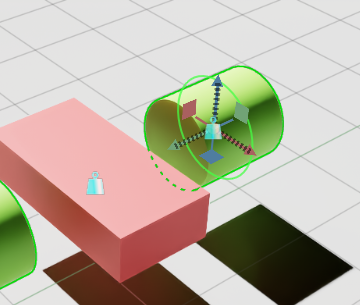
図の様になれば完成です。反対側の車輪も同じ設定していきます。
物理シミュレーション実行します。Shiftキーを押しながら、パーツをドラッグすると移動が可能になります。
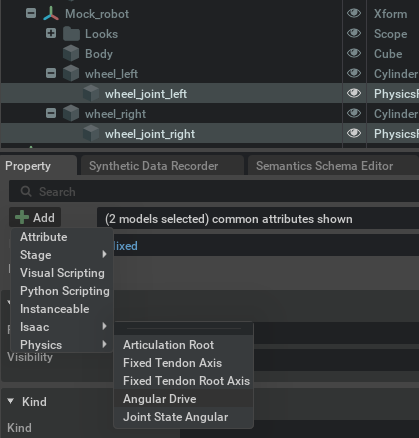
物理シミュレーションを停止して、2つのJointを選んで、+Add→Physics→AngularDriveを実行します。
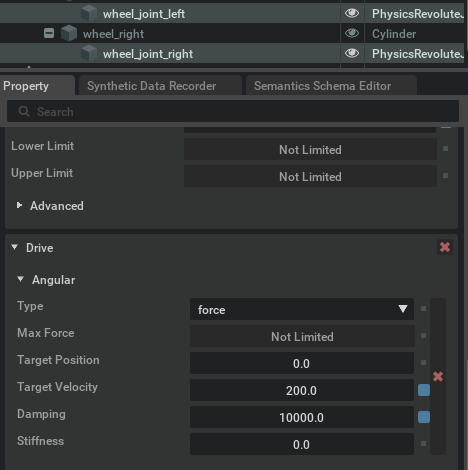
2つの車輪のAngularの値を図の様に変更して、車輪に回転速度を与えます。
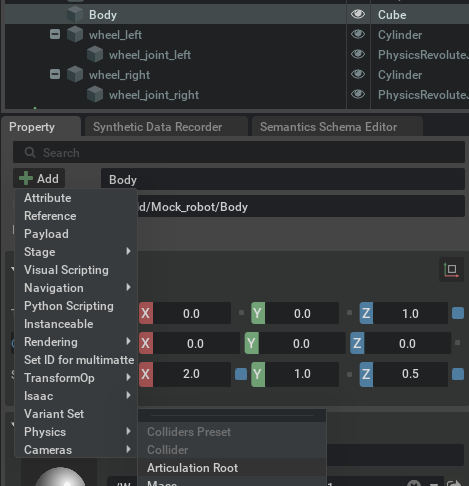
更にロボットの軸の計算精度を上げる為、Bodyを選択して「+Add」→Physics→ArticulationRootを実行します。
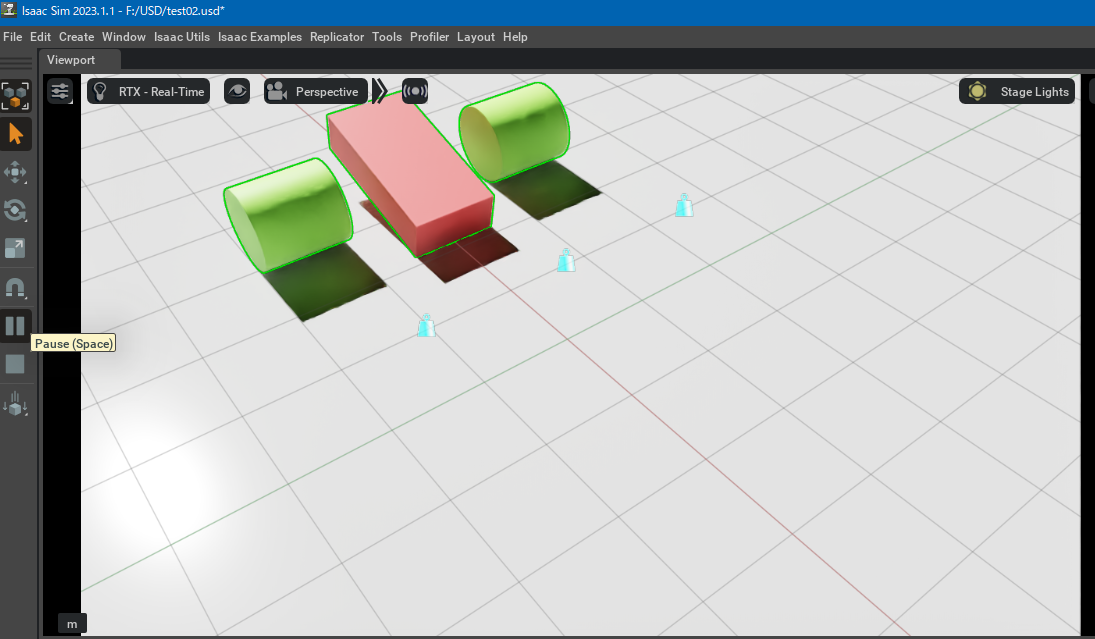
物理シミュレーションを実行するとロボットが走行します。